原标题:特斯拉墓地见鬼?自动驾驶系统看见“幽灵”的技术真相
感知算法仍需提升,安全隐患确实存在

文丨顾翎羽
编辑丨谢丽容
一则“墓地见鬼”的视频再度把对特斯拉自动驾驶的质疑送上风口。
近日,一名外国网友在Tiktok上发视频称,自己驾驶特斯拉行经无人墓地,特斯拉却感应出了很多行人,此举引发不少网友跟帖,表示自己的特斯拉在无人街道也曾感应出行人。就在2月15日,福建厦门,一辆特斯拉两旁无车,车内大屏幕上却显示有公交车。
特斯拉官方没有针对这个视频做出回应,但其自动驾驶技术路线和固有缺陷值得关注。
类比人的驾驶过程,汽车的自动驾驶系统也主要分为三个部分:感知,即能“看见”外界;决策,即根据感知结果决定接下来的动作;执行,就是将决策付诸行动。
目前,市场上主要的感知解决方案有两种:一种是以Waymo为代表的“视觉+空间”融合方案;一种是以特斯拉为代表的的纯视觉方案。
据《财经》记者了解,特斯拉感知系统采用多传感器融合,通过算法分析传感器捕获的物体信号,再以视觉化方式呈现给驾驶员,其传感器配置包括了6个摄像头(侧方后视、前视宽视野、前视主视野、前视窄视野、后视、侧方前视),1个超声波传感器和1个毫米波雷达。
华为公司的一位自动驾驶研发人员告诉《财经》记者,不同传感器各有擅长,互相平衡。其中,摄像头获得的2D图像缺少深度信息,需要深度感知来弥补自动驾驶路径规划需要的3D信息;毫米波雷达可以检测有足够反射强度的运动目标,但是无法分辨探测目标究竟是什么。
上述华为技术人士的判断是,如果这个“墓地见鬼”视频是真的,那么可能是当时周围环境中存在地面障碍物等干扰因素,感知系统应该是出现了误检。
出现误检的原因有两种可能:一种是毫米波雷达将和人类似的其他运动物体回波误检为人;另外一种是在摄像头辅助情况下,通过视觉算法识别认为是人。
专注车载智能芯片的独角兽地平线公司的一位算法技术专家告诉《财经》记者,看见“幽灵”属于无中生有,基于深度学习的算法会存在这种问题,并且在当下的技术水平下无法避免。这种算法缺陷并不是代码执行效果不佳,而是一种目标检测的基本缺陷。在这种技术路线下,才会需要多传感器融合来取长补短。
特斯拉以相机为主的感知方案一度备受争议。这种方案廉价,几乎是只用摄像头就完成了感知和精确定位的所有功能,不依赖成本高昂的激光雷达和高精地图,降低硬件和基础设施成本。这是特斯拉能够实现大规模整车量产的前提。
多位接受《财经》记者采访的行业技术人士的共同观点是,未来,以特斯拉为代表的自动驾驶感知发展趋势特点主要有三:一是摄像头重要性增加,数量逐渐增多、像素密度升级、覆盖范围也从车外到车内;二是感知从静态目标到动态场景,识别从整体到细节,对移动目标预测也在增强;三是从单车感知向协同感知发展,但单车感知依然是基础。
因此,这是消费者们需要警惕的另一点:虽然特斯拉在2016年10月以后生产的车辆都配备了全自动驾驶硬件,但是自动驾驶能力是通过后续软硬件系统的升级逐渐获得的。
比如,虽然特斯拉拥有海量数据可优化系统,但是在驾驶场景下,一旦识别出现问题往往是严重后果。
版权及免责声明:凡本网所属版权作品,转载时须获得授权并注明来源“融道中国”,违者本网将保留追究其相关法律责任的权力。凡转载文章,不代表本网观点和立场。
延伸阅读




 马斯克V.S薛其坤:立足当下 对人类未来展开无限想象
马斯克V.S薛其坤:立足当下 对人类未来展开无限想象
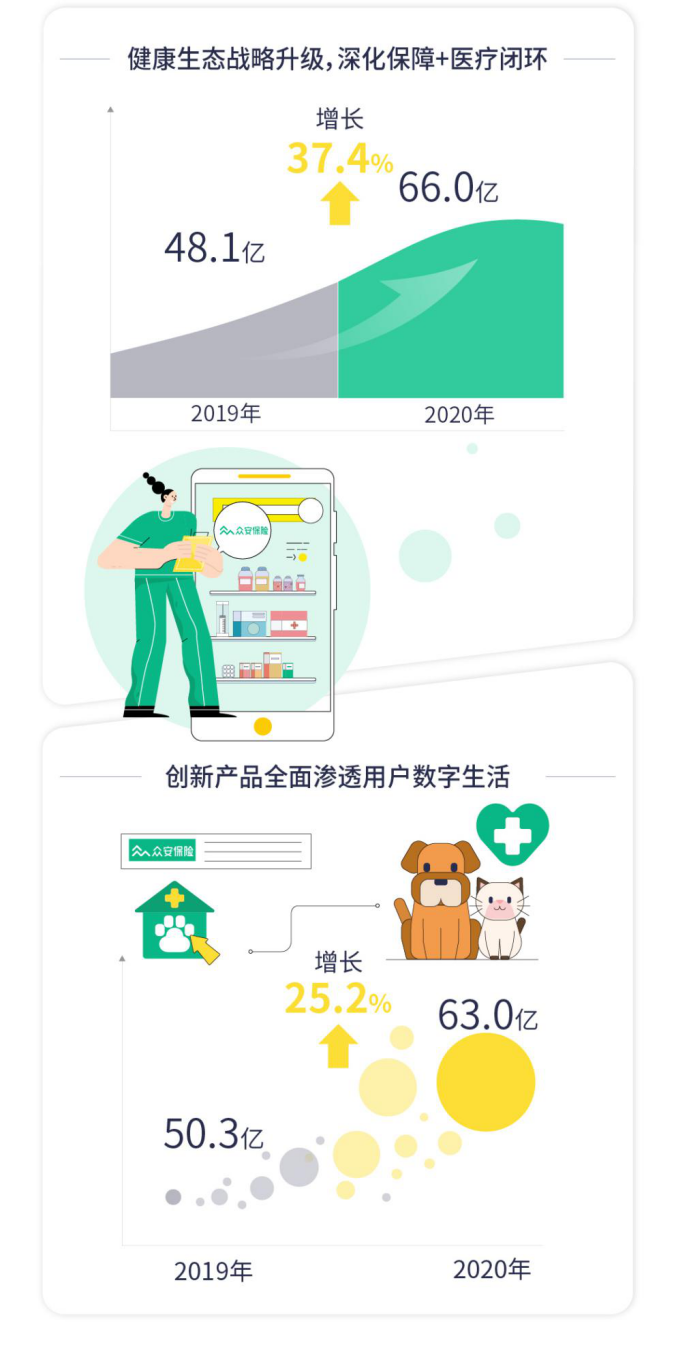 众安在线扭亏为盈:2020年净利5.5亿 数字生活生态驱动增长
众安在线扭亏为盈:2020年净利5.5亿 数字生活生态驱动增长
版权所有:融道中国